Распиновка Драйверов Шд
Драйверы униполярного и биполярного шагового двигателя. Драйвер L2. 98. N. Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. Ресурсов современных микроконтроллеров вполне хватает для этого даже в самом ”тяжелом” режиме – микрошаговом. Для подключения шаговых двигателей через слаботочные логические сигналы микроконтроллеров необходимы усилители сигналов – драйверы. В функцию драйверов входит: обеспечение необходимого тока и напряжения на фазных обмотках двигателя; коммутация обмоток. Речь в этой статье идет о простых драйверах, достаточных для большинства приложений.

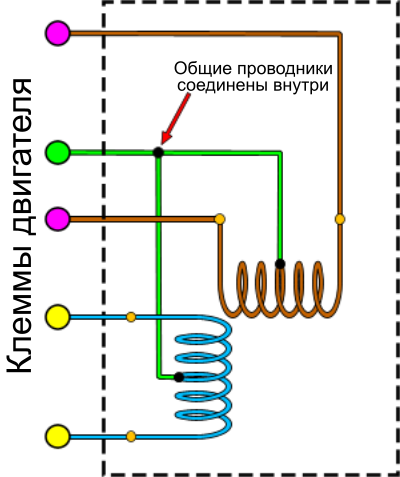
Существуют драйверы с гораздо большими возможностями: обеспечение быстрого нарастания тока при включении и быстрого спада при выключении; уменьшение тока для фиксации положения остановленного двигателя; защитные функции; формирование тока и напряжения обмоток для микрошагового режима; и многие другие. Схемы таких драйверов достаточно сложные, а в этих функциях в большинстве приложениях нет необходимости. По схеме подключения шаговые двигатели делятся на униполярные и биполярные. Четыре обмотки с общим проводом, подключенным к одному полюсу источника питания. Если другие выводы обмоток последовательно коммутировать к другому полюсу источника, то ротор двигателя будет вращаться.
Для коммутации обмоток таким способом достаточно всего четырех ключей, замыкающих обмотки на землю. Схемы коммутации обмоток двух предыдущих вариантов двигателей выглядят так. Если последовательно замыкать ключи 1, 2, 3, 4, то ротор двигателя будет вращаться. Схема драйвера униполярного шагового двигателя. Практически ключи можно выполнить на биполярных транзисторах, но предпочтительнее использовать низкопороговые MOSFET транзисторы. Я применяю транзисторы IRF7. При управляющем сигнале высокого уровня (+5 В) ключ открыт, и через обмотку фазы идет ток.
Диод шунтирует обмотку двигателя в обратном направлении. Он необходим для защиты транзистора от бросков напряжения самоиндукции при выключении фазы. Для управления двигателями на значительных скоростях вращения, лучше использовать высокочастотные диоды, например, FR2. Вот фрагмент схемы подключения униполярного шагового двигателя к микроконтроллеру. Защиты от коротких замыканий в этой схеме нет. Реализация защиты значительно усложняет драйвер.
Я не встречался с таким явлением. Да и на фоне неприятности по поводу сгоревшего дорогого двигателя, замена транзистора не выглядит проблемой. Кстати, механическое заклинивание вала шагового двигателя не вызывает недопустимых токов в ключах драйвера и защиты не требует. А это изображение платы контроллера униполярного шагового двигателя с PIC контроллером фирмы Microchip. Простая плата с восьми разрядным микроконтроллером PIC1. F2. 52. 0 управляет: двумя шаговыми двигателями с током фазы до 3 А; двумя ШИМ ключами для электромагнитов; считывает состояние 4х датчиков; обменивается данными по сети с центральным контроллером.
Этот контроллер используется в составе системы управления шаговыми двигателями практически во всем фасовочном оборудовании фирмы ”РОСТ”. Несмотря на простоту контроллера, реализованы следующие режимы управления: полно- шаговый, одна фаза на полный шаг; полно- шаговый, две фазы на полный шаг; полу- шаговый; фиксацию положения двигателя при остановке. К достоинствам управления шаговым двигателем в униполярном режиме следует отнести: простой, дешевый, надежный драйвер. К недостаткам: в униполярном режиме крутящий момент примерно на 4. Пример практической схемы простого контроллера униполярного шагового двигателя. Статья о подключении униполярного шагового двигателя к плате Ардуино.
Драйвер биполярного шагового двигателя. В биполярном режиме могут работать двигатели, имеющие любые конфигурации обмоток. У биполярного двигателя по одной обмотке для каждой фазы.
Обычно две обмотки AB и CD. В первых двух вариантах четыре обмотки соединяются так, что получается две. Обмотки по очереди подключаются к источнику питания в одной полярности, затем в другой. Драйвер биполярного двигателя должен обеспечивать сложную коммутацию. Каждая обмотка: подключается в прямой полярности к источнику напряжения; отключается от источника напряжения; подключается с противоположной полярностью.

Механика; Электроника; Шаговые двигатели. Подключение биполярного шагового двигателя к микроконтроллерам AVR (ATmega8).

Использование модуля L298N H-bridge для двигателей, напряжение питания которых находится в диапазоне от 5 до 35 вольт. Подключение к Arduino .
- Драйвер: Драйвер шагового двигателя (не путать с компьютерными.
- Формулы и готовые примеры для настройки тока ШД. Анализ зависимости уровня. Драйверы шаговых двигателей. A4988 на ток до 2А. По этой ссылке как раз произвожу первое подключение.
- Все же для проверки я попробовал бы запустить от AVR, который я запрограммил для тестирования драйверов и ШД и лабораторного .
- ПРОСТОЙ ДРАЙВЕР ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ СВОИМИ РУКАМИ ССЫЛКА НА СХЕМУ .
- L298N Управление шаговым двигателем. Схемы драйверов шагового двигателя. Подключение шагового двигателя.
Схема коммутации одной обмотки биполярного двигателя выглядит так. Для обеспечения двух полярных коммутаций от одного источника питания требуется 4 ключа. При замыкании 1 и 2 ключей обмотка подключается к источнику питания в прямой полярности. Замыкание 3 и 4 ключей подает на обмотку обратную полярность напряжения. Сложность драйвера биполярного шагового двигателя вызвана не только большим числом ключей ( 4 ключа на обмотку, 8 ключей на двигатель), но и: сложное управление верхними ключами ( 1 и 4) от логических сигналов “привязанных” к земле; проблемы со сквозными токами при одновременном открывании ключей одного плеча ( 1,3 или 2,4).
Сквозные токи могут возникать из- за не одинакового быстродействия нижнего и верхнего ключа. К примеру, нижний ключ уже открылся, а верхний – не успел закрыться. Схема драйвера биполярного шагового двигателя.
Реализовать схему драйвера биполярного шагового двигателя на дискретных элементах довольно сложно. Могу показать мою схему, которая подключает биполярный двигатель к униполярному драйверу. Эта схема используется для управления биполярными двигателями от контроллера, приведенного в качестве примера в предыдущей главе. Схема достаточно простая. Проблема сквозных токов решается за счет резисторов 0. Ом в коммутируемых цепях.
В момент коммутаций MOSFET транзисторов, верхний и нижний ключ оказываются одновременно открытыми на короткое время. Эти резисторы и ограничивают сквозной ток.
К сожалению, они ограничивают и рабочий ток двигателя. Поэтому, несмотря на мощные транзисторы, драйвер по такой схеме можно использовать для токов коммутации не более 2 А. Схема не требует диодов для защиты от эдс самоиндукции обмоток, потому что эти диоды интегрированы в MOSFET транзисторы. Гораздо удобнее и практичнее использовать интегральные драйверы биполярного шагового двигателя.
Самым распространенным из них является микросхема L2. N. Драйвер биполярного шагового двигателя L2. N. Описания этой микросхемы на русском языке практически нет.
Поэтому привожу параметры L2. N достаточно подробно, по официальным материалам производителя этой микросхемы – компании STMicroelectronics (datasheet l. L2. 98. N это полный мостовой драйвер для управления двунаправленными нагрузками с токами до 2 А и напряжением до 4.
В. Драйвер разработан для управления компонентами с индуктивными нагрузками, такими как электромагниты, реле, шаговые двигатели. Сигналы управления имеют TTL совместимые уровни. Два входа разрешения дают возможность отключать нагрузку независимо от входных сигналов микросхемы. Предусмотрена возможность подключения внешних датчиков тока для защиты и контроля тока каждого моста. Питание логической схемы и нагрузки L2. N разделены. Это позволяет подавать на нагрузку напряжение другой величины, чем питание микросхемы.
Микросхема имеет защиту от перегрева на уровне + 7. Если контроль тока не используется, они соединяются с землей. Sense B 2 Out 1. Выходы моста A. Out 2 4 Vs. Питание нагрузки.
Между этим выводом и землей должен быть подключен низкоимпедансный конденсатор емкостью не менее 1. Ф. 5 In 1. Входы управления мостом A. TTL совместимые уровни. In 2 6 En AВходы разрешения работы мостов.
TTL совместимые уровни. Драйвера Для Звуковой Карты Realtek Hd Audio на этой странице. Низкий уровень сигналов запрещает работу моста. En B 8 GNDОбщий вывод. Vss. Питание логической части микросхемы (+ 5 В).